Lunar Rover — Space Exploration Project
Overview: Led the Lunar Rover Space Exploration Project at CISS (Center for Innovation in Science & Space), overseeing a team of interns, verifying electrical design, and presenting the final system at the Dubai Air Show 2025. Rover was developed from scratch — fully (hardware and software) — by us, interns at CISS.
Key Contributions:
- Led a team of interns — managed electrical design verification and troubleshooting
- Developed autonomous navigation software using ROS2, NAV2, and SLAM Toolbox, leveraging PyTorch and TensorFlow
- Integrated Vision-Language-Action (VLA) and LLM models into the Lunar Rover
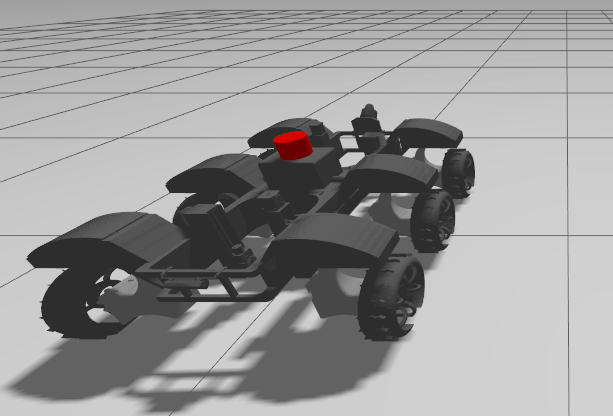
- Validated system accuracy in Gazebo and MuJoCo simulation environments
- Presented the completed rover at the Dubai Air Show 2025


Autonomous Navigation — Unitree Go2
Overview: Used the Unitree Go2 quadruped robot with an Intel D435i depth camera for autonomous navigation and computer vision integration. Achieved a 40% reduction in system downtime through Linux environment optimization.
Key Contributions:
- Integrated Unitree Go2 + D435i with ROS2 Humble on Linux for full autonomy pipeline
- Developed and maintained Linux-based testing environment for autonomous vehicle runs
- Implemented advanced computer vision algorithms for navigation accuracy
- Reduced system downtime by 40% through performance optimization

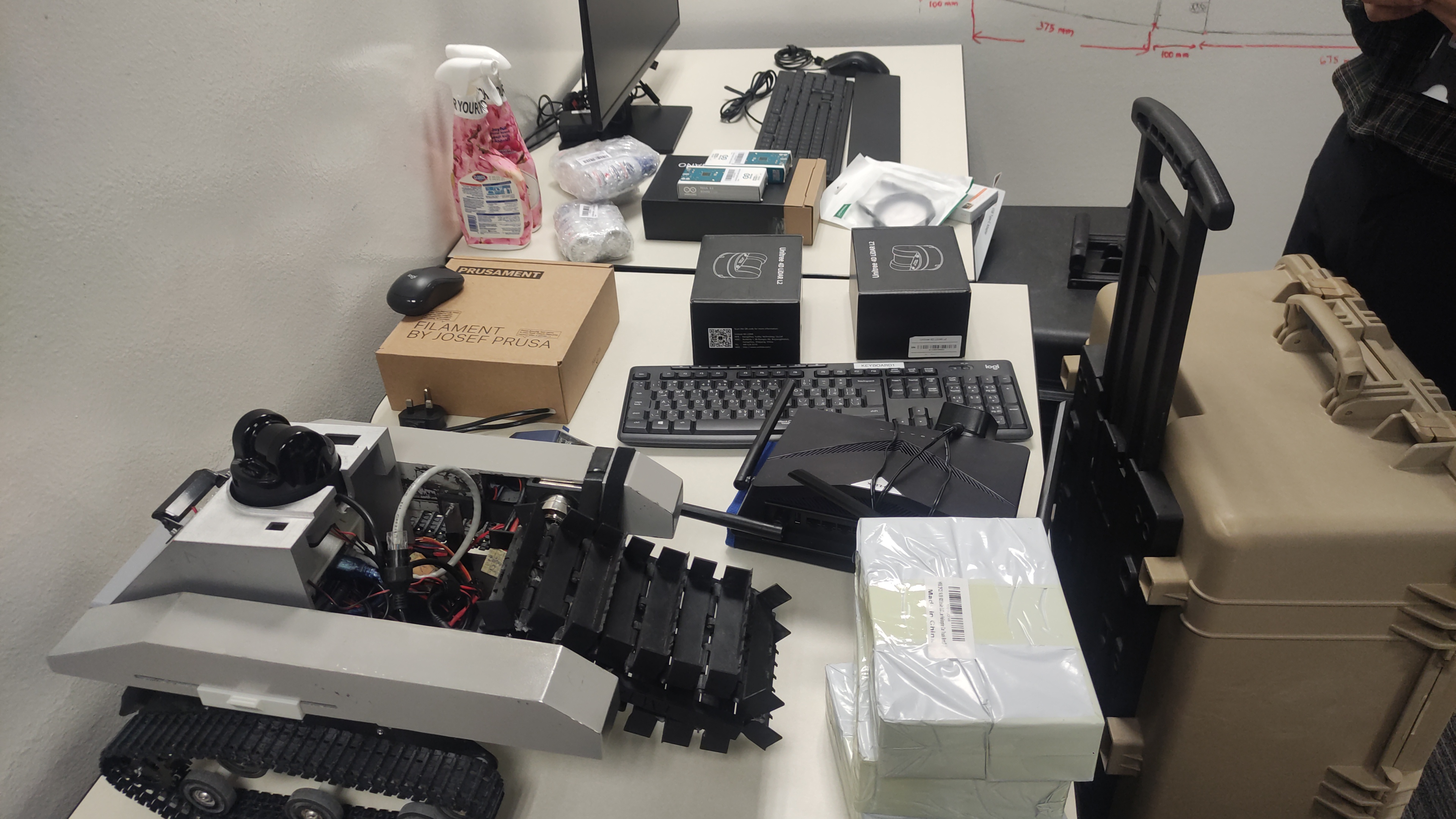
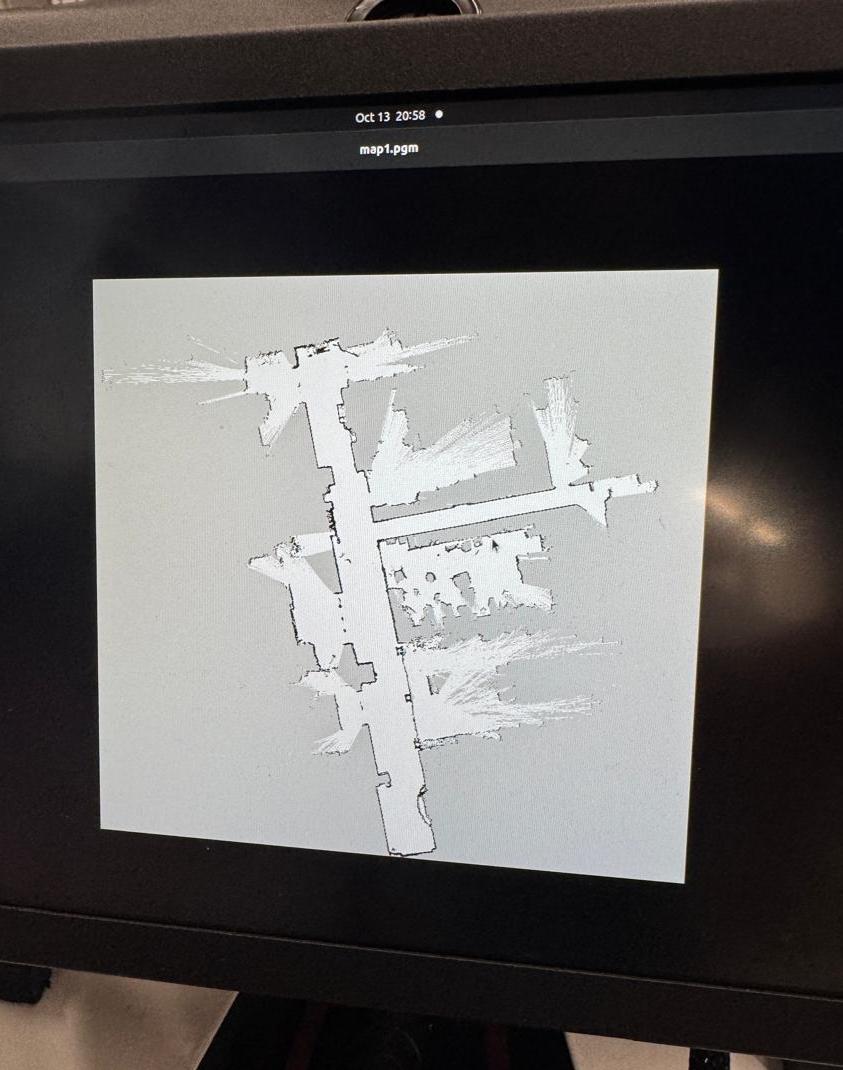
LiDAR Autonomous Navigation — Lockheed Martin
Overview: Used the Unitree L2 LiDAR for autonomous navigation, designed PCB circuits, and gained hands-on experience with CAN communication on Jetson Orin hardware.
Key Contributions:
- Deployed Unitree L2 LiDAR for real-time autonomous navigation
- Designed circuits for PCB boards, reducing troubleshooting time by 4–5 hours
- Gained CAN communication and timing expertise with ROS2 on Jetson Orin
- Improved system integration efficiency across hardware/software stack
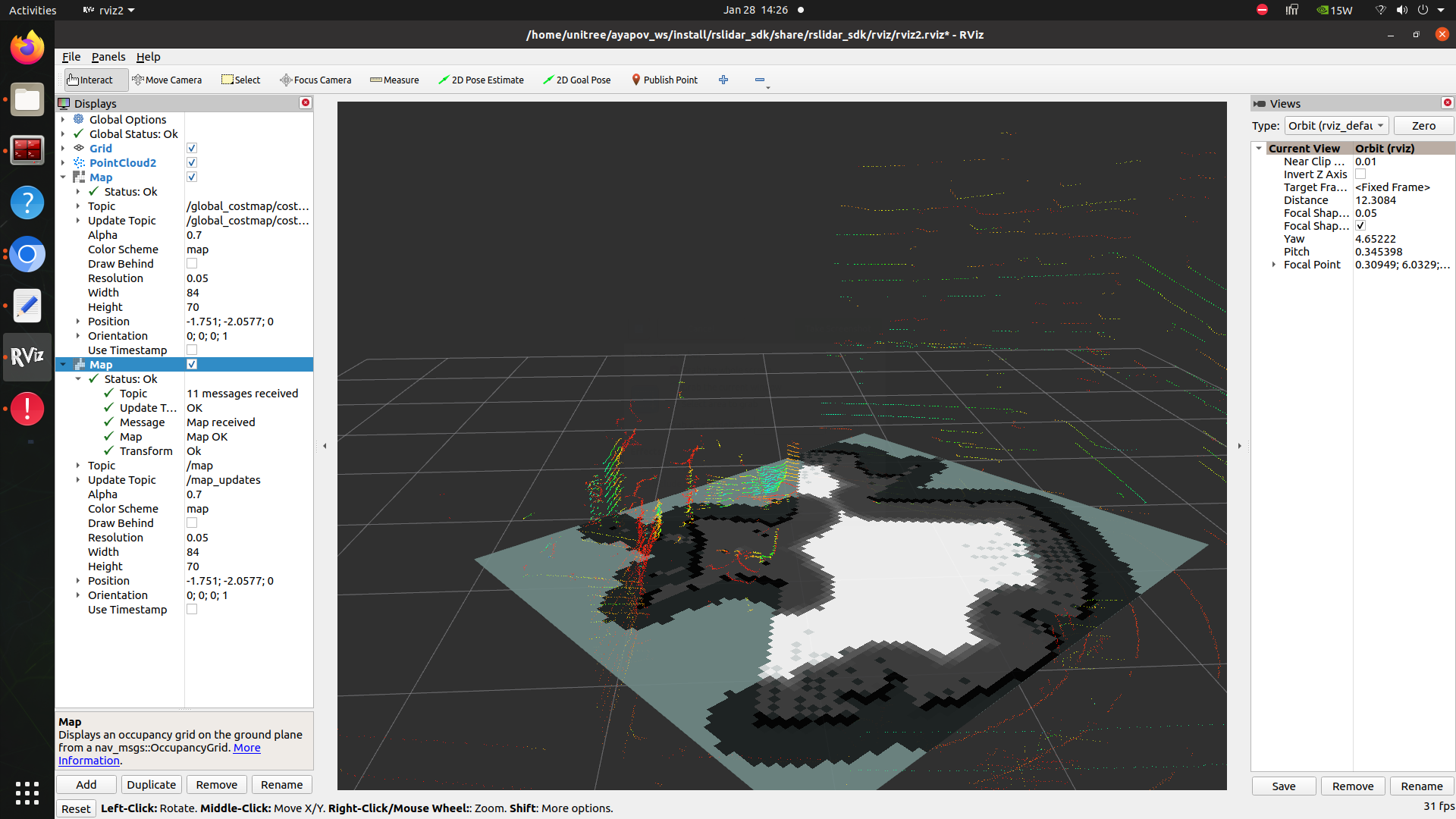


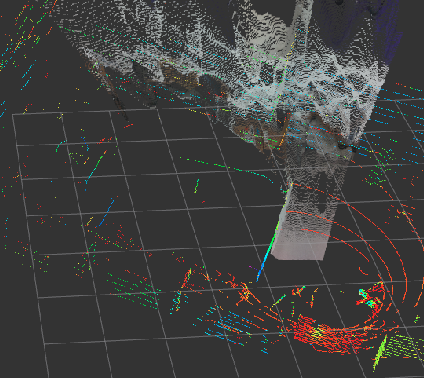
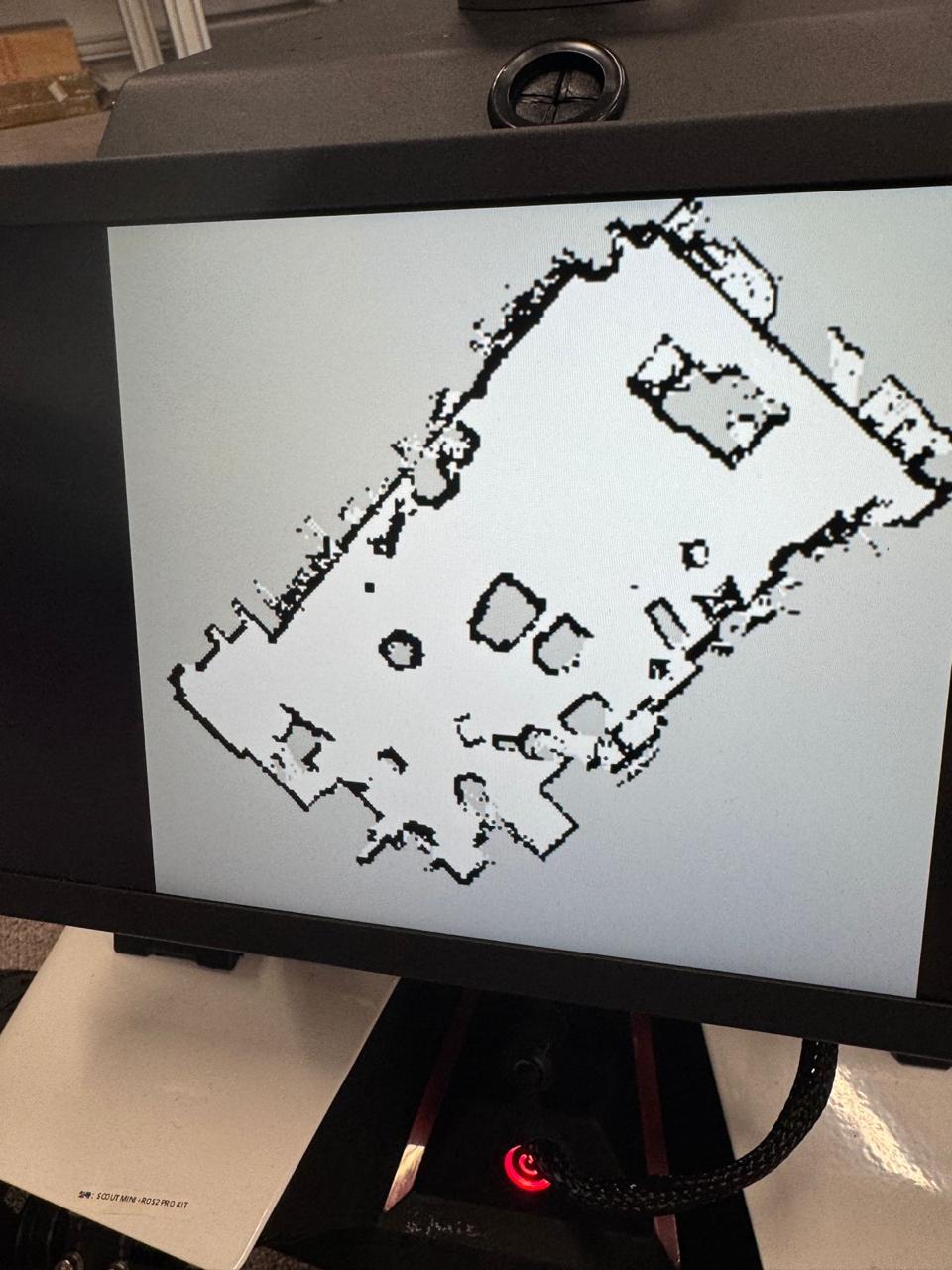
3D Point Cloud SLAM — NYUAD STEM
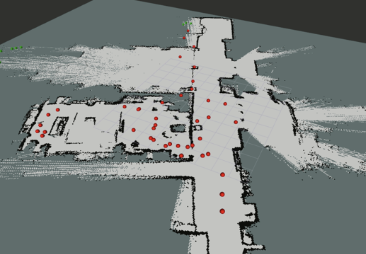
Overview: Developed a ROS2 package using D435i sensors and Jetson CUDA GPUs to build dense 3D point cloud maps. Achieved a 70% reduction in localization errors using a custom costmap + cartographer algorithm.
Key Contributions:
- Built ROS2 package for 3D point cloud mapping using D435i + Jetson CUDA GPU
- Created improved indoor localization algorithm using costmaps + cartographer mode
- Reduced localization errors by 70% compared to baseline
- Optimized GPU-accelerated processing pipeline for real-time performance
Embedded AI — Bionic Chips (QRB5)
Overview: Researched hardware/software co-optimization for Spiral Neural Networks on Qualcomm QRB5 edge AI chips (eBrainChips), optimizing how AI models are deployed onto neuromorphic hardware.
Key Contributions:
- Used Qualcomm QRB5 toolkit for embedded AI benchmarking
- Optimized Spiral Neural Networks for better embedded AI computation
- Explored quantization and pruning techniques for chip deployment
- Analyzed power vs. accuracy tradeoffs on eBrainChip hardware

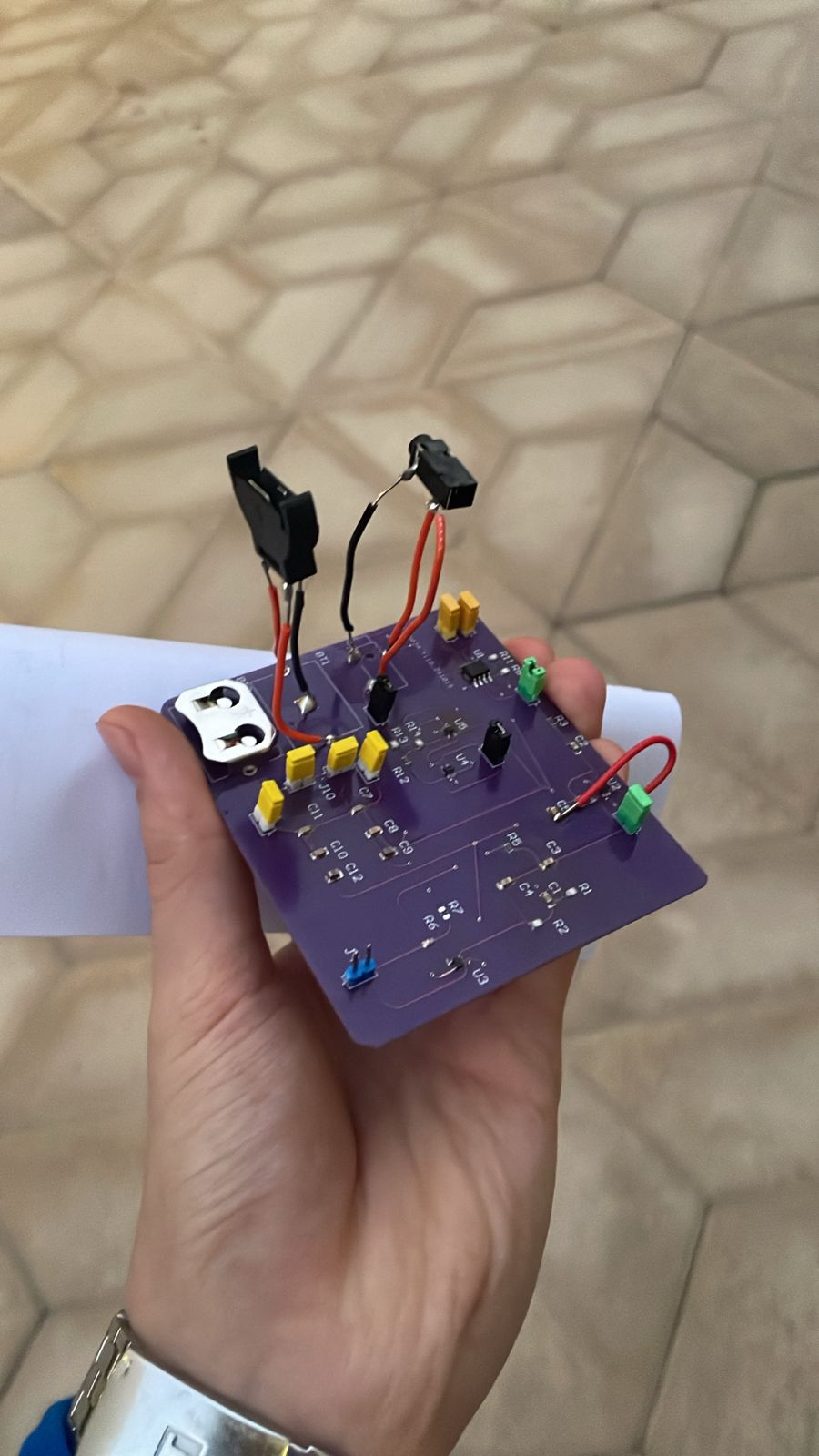
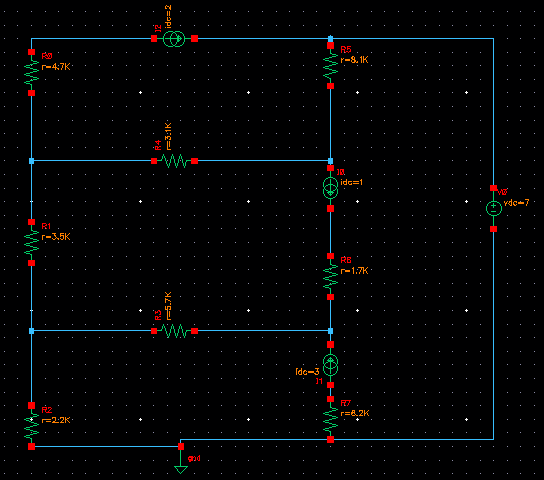
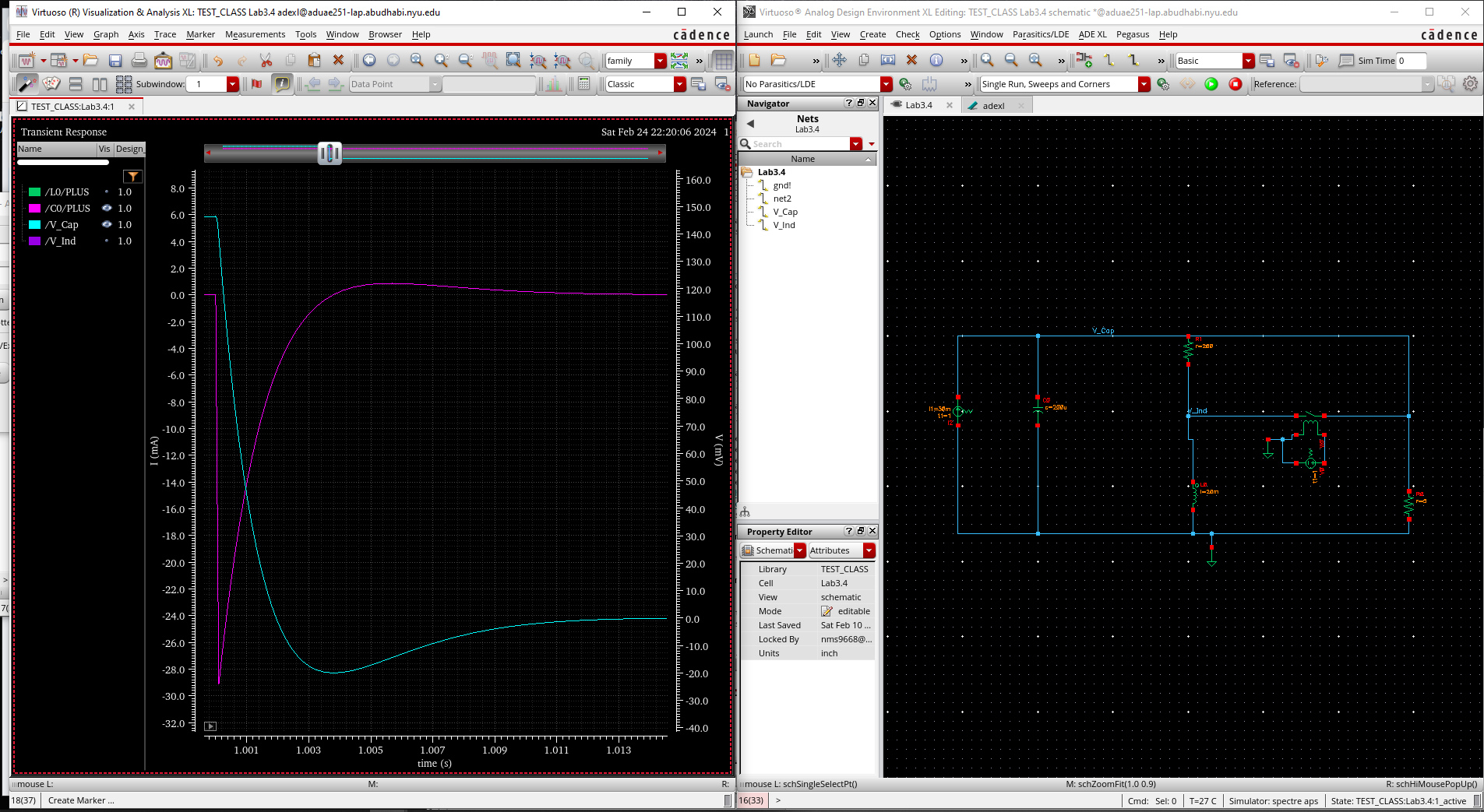
Electrocardiogram (ECG) PCB Design
Overview: Complete end-to-end design, simulation, fabrication, and testing of a functional ECG board — from analog front-end schematic to a physically tested PCB that captures real cardiac signals.
Key Contributions:
- Designed analog front-end: instrumentation amplifier, bandpass filters, gain stages
- Schematic capture and PCB layout in Altium Designer
- Fabricated board and performed full electrode signal testing
- Validated output waveform against reference ECG signal
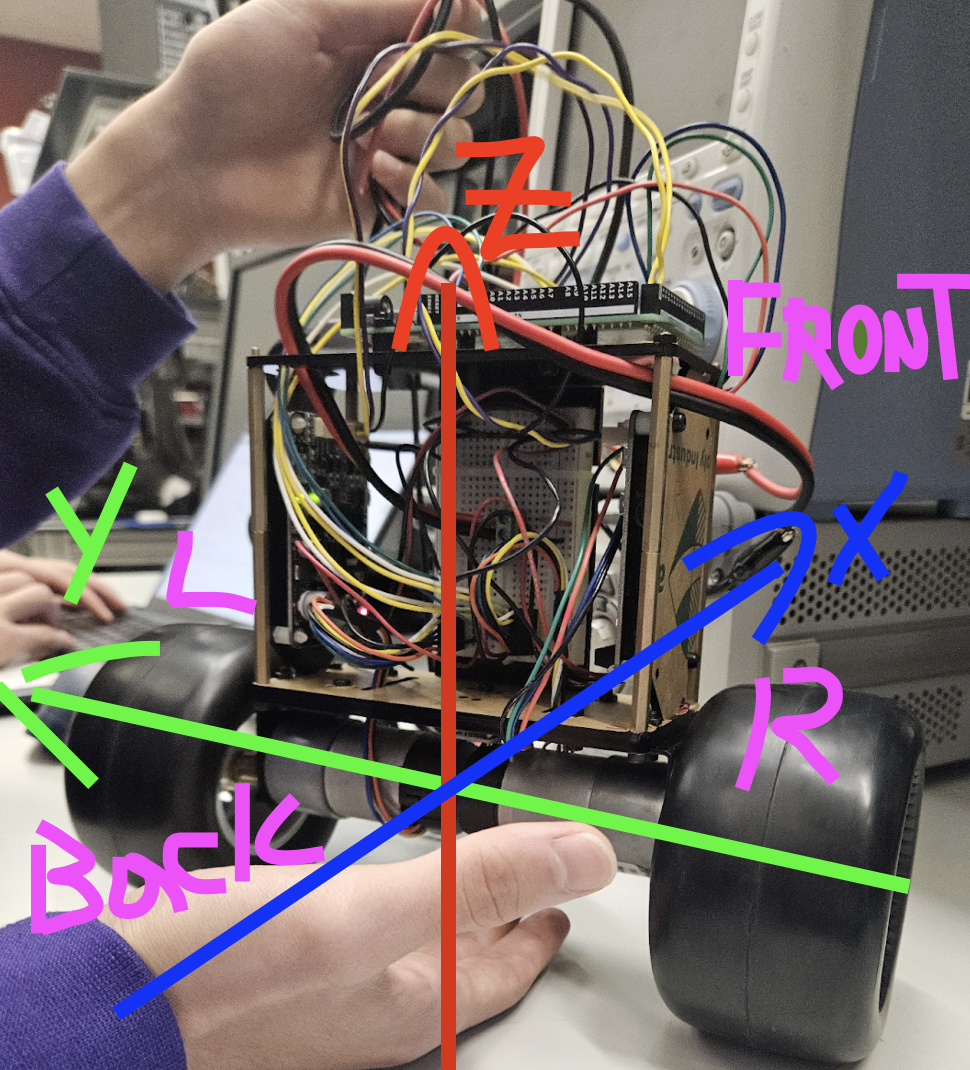
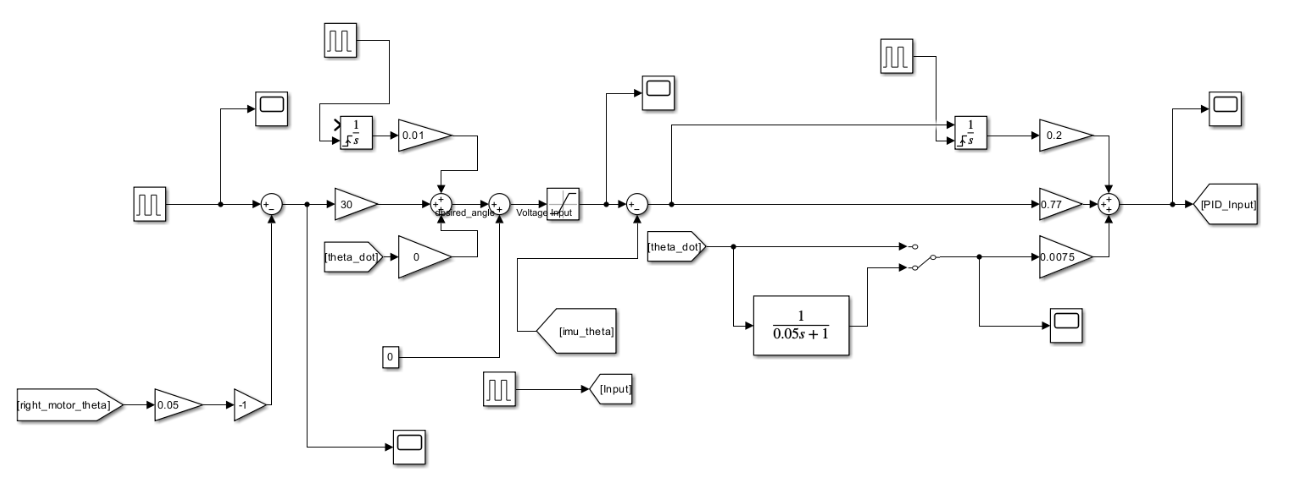
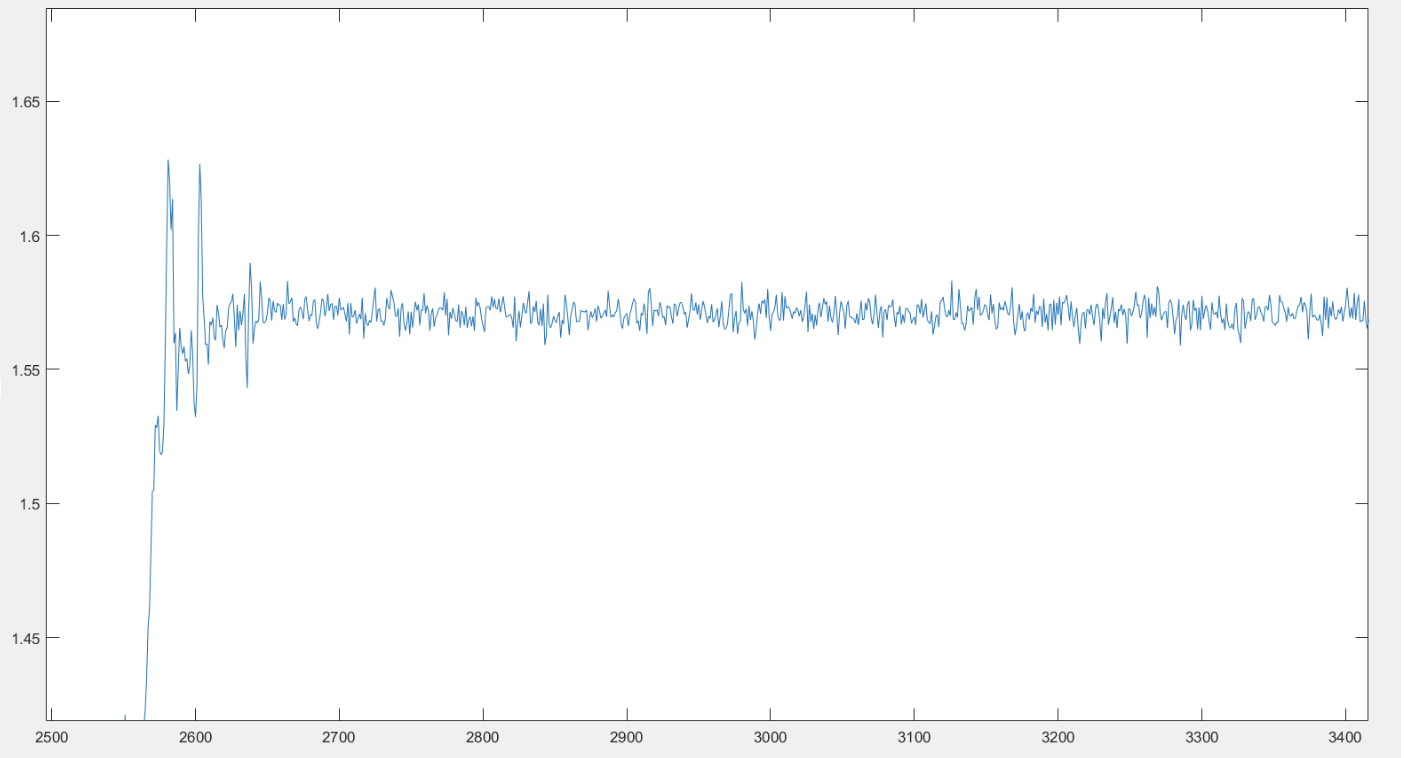
Self-Balancing Two-Wheel Robot
Overview: Modeled the inverted pendulum dynamics, derived transfer functions in MATLAB, and designed a PID controller that successfully stabilizes a physical two-wheel robot in real-time.
Key Contributions:
- Derived linearized equations of motion for the inverted pendulum system
- Calculated open/closed-loop transfer functions in MATLAB
- Tuned PID gains using root locus and Bode plot analysis
- Successfully tested and validated on physical hardware
FPV Drone Construction & PX4 Simulation
Overview: Assembled a full FPV drone from scratch (hardware + software) and developed PX4-based simulation software for training drone pilots.
Key Contributions:
- Full hardware assembly: frame, motors, ESCs, flight controller, FPV camera
- Configured and flashed PX4 firmware on flight controller
- Developed pilot training simulation software on PX4 platform
- Performed calibration and maiden flight testing


Licenses, Certifications & Awards
| Certification / Award | Issuer | Date |
|---|---|---|
| KUKA Platform Trained | NYU Abu Dhabi | Feb 2026 |
| Robotic Process Automation (RPA) | Coursera | Aug 2025 |
| Generative Artificial Intelligence | Coursera | Aug 2025 |
| Certificate of Appreciation | NYU Abu Dhabi | May 2025 |
"Appreciation for the immense input to the Engineering Community at NYU."
Technical Skills
| Domain | Tools & Technologies |
|---|---|
| Robotics / ROS2 | ROS2 (Foxy, Humble), Nav2, SLAM Toolbox, Cartographer, RTABmap, Gazebo, MuJoCo |
| Programming | C++, Python, MATLAB, VHDL, Bash, Arduino |
| AI / ML | PyTorch, TensorFlow, YOLO, VLA, LLM integration, Spiral Neural Networks |
| Hardware Design | Altium Designer, AutoCAD, Circuitverse, PCB fabrication, CAN Bus |
| Embedded Platforms | Jetson Orin, Qualcomm QRB5, Arduino, Unitree Go2, KUKA |
| Sensors | Unitree L2 LiDAR, Intel D435i, IMU, ECG electrodes |
| Languages | English, Russian, Kazakh |